LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
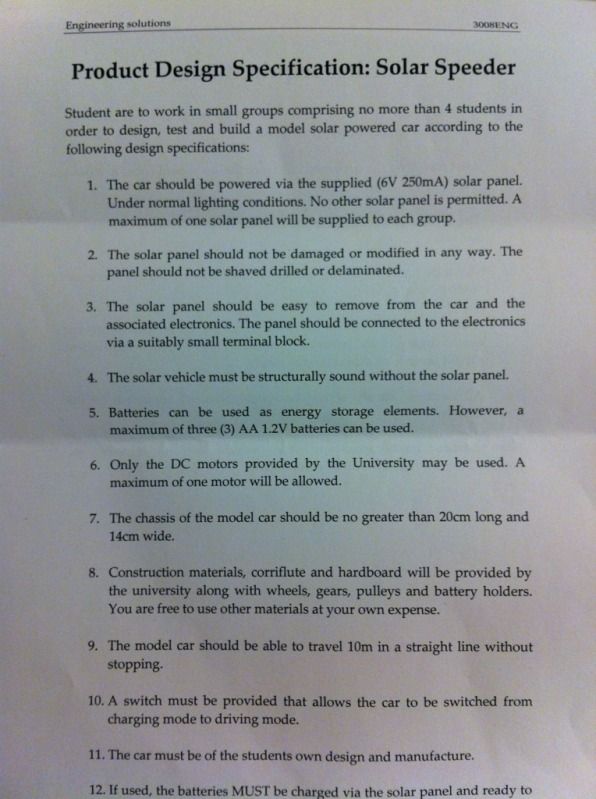
hmm, a bit lost but ill see if i can get my aroudn it. its only gonna be 20cm long though am i gonna have room to fit a pulse sensor on the axel?
|
Dom
Member
Registered: 13th Sep 03
User status: Offline
|
quote:
Originally posted by John
What about using a capacitor?
Get one just the right size to give you 10 metres, would be really simple.
Depends what the learning outcomes are.
Easily calculated but too many variables come into play for it be really accurate.
I'd just go with the simplest solution of using a count-down relayed switch (should be able to pick something up on CPC/RS etc), connected to a battery and a motor (as said, sticking a diode and a solar cell onto the battery makes it technically 'solar powered'). Then you just set the timer to run the motor for X.x seconds. I'd be more worried about getting it down the 10m stretch as quickly as possible 
If you wanted something a bit more 'fancy' then do something similar to what Ian suggested. Although i'd used an Arduino (or another PIC development board) and a magnetic wheel pulse sensor, typically found on cycle computers, and just count the pulses (obviously Wheel Circumference x pulses = distance). Then just get it toggle a relay until X number of pulses has been reached.
Alternatively just use Lego Robotics, takes about 10secs to knock up something that'd travel X distance 
Is there any competition aspect? eg: quickest to do 10m or most accurate to stop at 10m (or both). As I'd be concentrating on that as it determines how you go about it tbh; ie: accuracy you'd employ some sort of braking system, speed you'd use highly wound/'bigger' motors and batteries etc etc.
Edit - What's stopping you using an RC car? Or do you actually need to build something?
[Edited on 17-01-2012 by Dom]
|
Ian
Site Administrator
 Registered: 28th Aug 99
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
Stepper motor would be another approach, with the benefit that it would effectively give brakes at the end of the run.
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
quote:
Originally posted by LeeM
hmm, a bit lost but ill see if i can get my aroudn it. its only gonna be 20cm long though am i gonna have room to fit a pulse sensor on the axel?
Reed switch and a magnet.
|
Dom
Member
Registered: 13th Sep 03
User status: Offline
|
quote:
Originally posted by Ian
Stepper motor would be another approach, with the benefit that it would effectively give brakes at the end of the run.
Was just thinking about that, as you say it would give you 'brakes' and accuracy. But don't they tend to be a lot slower that motors?
Tbf it all depends on the spec and if there is any form of competition.
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
Could address the speed with gearing, I think they'll be higher torque.
Not sure if it would need smoothing though, some sort of viscous coupling so it doesn't drive in bursts.
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
at the end the last line is charged before the session.
no real competition but obviously if one group do something mega impressive it will make the rest look worse and we're less likely to get a good mark. it makes up a big part of the grade for this year annoyingly
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
So you've only got 1.5 watts incoming, what are the AA, about 2000mAh?
If I was marking that I would be looking for all the ohms law calcs to be done so you've a suggested charge period and that you choose a motor which will flatten the battery on completion of the run, or at least discuss how that would be desirable given the spec.
[Edited on 17-01-2012 by Ian]
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
i have no idea
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
now that sounds ok, work out how much power the batterys will chuck out, find a motor that will use all of that power and drain the batteries at about the same time as its done 10m?
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
Yeah also note that although the spec isn't clear about the 10m thing, it just says travel 10m.
Again, interpretation but I would mark down any car which went too far. It doesn't say at least 10m or over 10m.
Not sure how good this guy is but if he's written a spec you should stick to it fairly rigidly. Although having said that he might not see it like me and might award points for the car which covers the most distance from the available energy, in which case you might want to design in an endurance mode which goes slower but uses less energy so goes further. Or goes faster has more momentum. Try and find out what they guy wants to see. Would be a disaster to adhere 100% to his list and them some other group of chancers comes along and makes something that goes flying off the table who win because it's ridiculous.
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
back page in a sec
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
Sounds like he's agreeing on the distance thing.
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
so the way youre interpreting that is more than 10m is better?
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
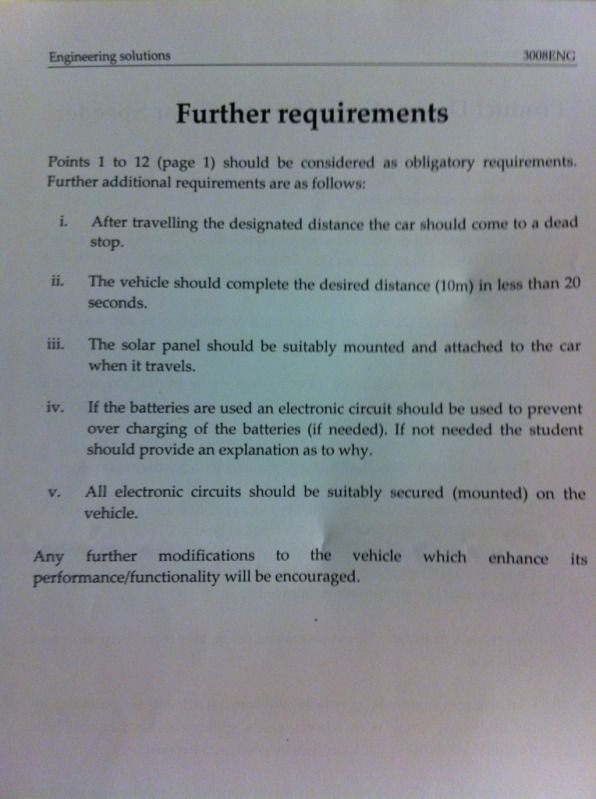
No, point i., it should come to a dead stop.
Which means what I was saying is what he wants and if it goes flying off the table you fail at point i.
Good news is the spec is fairly clear.
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
is there a way to make the wheels lock when the motor stops?
|
Dom
Member
Registered: 13th Sep 03
User status: Offline
|
quote:
Originally posted by LeeM
is there a way to make the wheels lock when the motor stops?
Yup, you brake a motor by shorting the connections. Won't be an instance stop, but the resistance (depending on size of the motor) will greatly slow it down.
Edit - Bit more info, http://www.societyofrobots.com/schematics_dcmotorbraking.shtml
Edit 2 - However, you haven't got a lot of power to play with and i doubt that solar cell will produce anywhere near the 6v/250mA he's stated.
Personally I'd go with something small, compact and light and keep it basic; perhaps a pair of count-down timers - one to fire it down the car down the track for X seconds, which in turns triggers another timer to brake the motor.
If you wanted to use intelligence, then look at the Arduino Mini board and use that as the 'timer' or feed it a sensor (but that's just adding excess weight tbf).
[Edited on 17-01-2012 by Dom]
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
any point of putting a diff on the rear axel? am iright in thinking it may keep it straighter or would it encourage it to change?
|
Ian
Site Administrator
Registered: 28th Aug 99
Location: Liverpool
User status: Offline
|
I wouldn't go with a diff, can't see it would be necessary with that spec. Would write up why you didn't though.
|
Dom
Member
Registered: 13th Sep 03
User status: Offline
|
Keep it fixed axel; can't see a diff giving you any more performance.
Edit - Too slow.
Edit 2 - As for the overcharge protection, have a google on the LM723 (think that's the one) and circuits; should find something.
[Edited on 17-01-2012 by Dom]
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
im terrible with electronics but ive got an nc and nd in mechanics so would like to apply a bit of what im good at to the project. but yeah i suppose if we dont put one in i can write up why not
|
LeeM
Member
Registered: 26th Sep 05
Location: Liverpool
User status: Offline
|
the diff would be more to show off rather than any real performance
|

















